
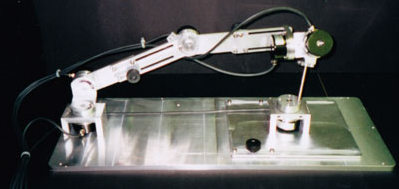
Robo-Arm
|
The motion of the large arm is directly controlled by a small arm with
a maximum reach of 25", mimicking a human arm with an inverted elbow
joint. |
|
The arm can be used with either a power tool (like a router) for foam
and soft to medium materials, or with different scraping tools for
clay. |
 |
For the design I had to take in consideration the changing geometry through the scale adjustment, the required torque, gear ratios and the weight of a tool.
 |
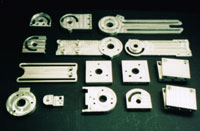
I mounted 3 Teijin Seiki and 3 Mectrol gearboxes, each with zero backlash. |
With the exception of the welded steel base and the drive components, the entire arm is made out of aluminum.
 |
 |
 |
 |
For the structural posts aluminum sail masts were used for their excellent weight-rigidity ratio.
For design and renderings I used Euclid CAD Software.